��ʿ�����ݴ洢��3842508038���Ϻ�Τ�����豸����˾��Ӫ���۲�Ʒ��ԭ��ԭװ���������ϣ��ȳϻ�ӭ���Ͽͻ���ѯ����
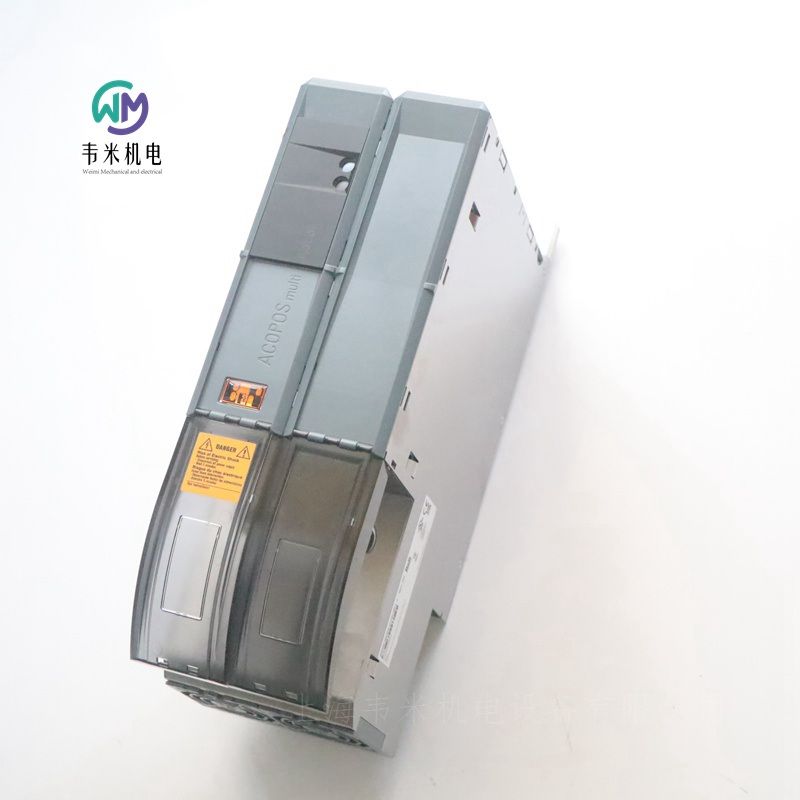
������ʿ�֣�BOSCH-REXROTH�����ݴ洢��
ID 10/Dͨ������Я����Ϣ��
�ɽ����ID 10/Dװ�����ӵ����������ϡ�
RFIDϵͳID 200��������������еĹ�ҵ��;��������ģ�黯ʶ��ϵͳ����ϵͳ���ƶ��������塢���ߺ�ͨ��ģ����ɡ�ϵͳ������ü�̡���������ƣ�ϵͳ�Թ��ϼ������У�ȷ�����ݴ��䰲ȫ��ID 200�����ڲ��ü���ʽ�ͷ�ɢʽ���ݴ洢��Ӧ�á�
�ƶ����������ر�С�ɣ����þ��õ�EEPROM�洢�����������������ϵ͵�Ӧ�á�����FRAM�洢�����ͺŻ������ڱ��ش洢�������ݣ����ҿ�������Ƶ����ȡ����д�����������ڴ���ʱ��϶̵�Ӧ�á����߲��ò�ͬ�������ʽ�ʹ���Ƶ�ʡ���ˣ���������κξ����Ӧ�úͰ�װλ��ѡ���ʵ�����ʽ��ͨ��ģ������������������ϲ����ϵͳ֮�佨�����ӡ�*���ͬʱ�����������ߣ�������ͬƵ�ʵ����ߡ����ṩPROFIBUS-DP����̫������Ϊ����ϵͳ�ӿڵĿ�ѡ�
ʶ������ݴ洢ϵͳID 40
ʶ��ϵͳID 40�ڹ����������ṩ�ɿ����ҿ��ٵĹ������ݡ�����ÿ�����������������ÿ���ӹ�վ�ṩ�����Ϣ��
����
-��������
-����״̬
-��һ�ӹ�����
-����
��һ�������ͬһ�豸����������ͺŵIJ�Ʒ��Ϊ��Ҫ��
�������ݾ��ɾ�̬��дͷ��SLK���洢���ƶ��������壨MDT���ϣ��ƶ���������ֱ��λ�ڹ������̣�WT���ϣ���ͨ�������������װ���̡���ɢʽ���ݴ洢ȷ������ʱ��̡�ϵͳ�����Ըߡ�
���ɵ�ɾ������ֻ����SLK�ϴ���������������ݴ洢�����������һ��ͣ����SLK�С�
��дͷ��SLK��Ϊ�ֳ�����ϵͳ�ṩ��ֱ�ӵ��ֳ��������ӡ�
PROFIBUS DPͨ��M12����ʽ��ͷʵ�����ӡ�
ID 40���Խ��ж�̬���ݴ��䣺����Ծ���“a”�������ٶ�30 m/���Ӵ���ʱ����������Ϊ64 �ֽڡ�
ʶ��ϵͳID 15�ܹ��ɿ����ҿ��ٵ�ʶ���������������װ�ڹ�������֮�ϻ�֮�£�Ҳ������ȫ���ɵ���ʿ�ֹ�������֮�С�ϵͳ����Ҫ�����ǿ������Ըߡ������Ըߣ�����ʱ��̡�
��дͷ��SLK��ͨ��M12����ʽ��ͷ����ִ�л������������ṩͨ��AS-i��ֱ�����ӡ�
ID 15���Խ��ж�̬���ݴ��䣺����Ϊ“a”�������ٶ�Ϊ20 m/����ʱ��
����USB���ӵĶ������ߣ���ID 15����������ʹ�ã����Կ������ɵس�ʼ���������塣
ʶ������ݴ洢ϵͳID 10
��ʶ������ݴ洢ϵͳID10�У�ͨ�����ݴ洢��ID 10/D�еı������ţ��Ի�е��ʽ���б��롣�ڰ�װ�����ڼ䣬���ݴ洢��ID 10/D�ڹ����������ƶ������Զ�ÿ�����ݴ洢����2������Ϣ���б��롣���ڽϴ�������������Դ����������ݴ洢����
ͨ��д��ͷID 10/S���ñ������ţ����������õ�λ���ɽӽ�����ͨ��д��ͷID 10/L���в�ѯ����ȡ����Ϣ�����ݵ��ϲ�����ϣ�������д��ͷ�е�ָ���趨ֵ���бȽϡ�
��ʿ�����ݴ洢��3842508038
��ʿ��REXROTHʶ������ݴ洢ϵͳID 10
1����ʿ��REXROTH���ݴ洢��ID 10/D
3842508038
2����ʿ��REXROTHд��ͷID 10/S
3842168610
3����ʿ��REXROTHд��ͷID 10/L
3842174350
3842174360
4��REXROTH��ʿ��ID 10/S��ID 10/L�Ľ�����
3842525241
3842525242
3842525261
3842525262
��ʿ��REXROTHװ�似��
һ����ʿ��REXROTH����Ԫ��
1����ʿ��REXROTH������
3842528746
3842535624
3842535428
3842500921
3842502684
3842500923
8981019457
8981019448
8981019452
8981019449
8981019458
8981019450
8981019461
8981019455
2��REXROTH��ʿ��90°������
3842530326
3842549862
3842549864
3842549870
3842549872
3842535571
3842535572
3842535466
3842535458
3842535577
3842535578
3842535465
3842535459
8981021301
3842530235
8981021302
3842530236
3842523968
3842523970
3842527174
3����ʿ��REXROTH�dzŰ�
3842523508
3842523511
3842523520
3842515547
3842523525
3842523528
3842523530
3842523538
3842523541
3842536672
3842528967
3842529383
3842529005
3842548863
3842548862
3842518424
3842523558
3842523561
3842548865
3842548864
3842523567
3842523570
3842523572
3842523546
3842523553
3842548869
3842548868
3842523575
3842523578
3842529386
4��REXROTH��ʿ��T���������ͻ������
3842530329
3842529299
3842529300
3842529324
3842528741
3842528738
3842528735
3842523140
3842523142
3842529296
3842529297
3842529320
3842514928
3842514929
3842514930
3842514931
3842516669
3842523145
3842516685
5��REXROTH��ʿ��T����ĸ��T����˨
3842111987
3842111988
3842111989
8981021555
8981021342
8981021343
8981021344
8981021554
8981021345
8981021346
8981021347
8981021323
8981021322
8981021324
8981021321
3842530281
3842530283
3842530285
3842530287
8981019580
3842523135
8981019577
8981019578
8981019579
8981016124
8981016123
8981016122
3842501751
3842501752
3842501753
8981020861
3842345081
3842528715
3842528718
3842532879
������ʿ��REXROTH��̬��״���
3842544637
3842548129
3842548130
3842541193
3842541212
3842541211
3842541214
3842541213
3842541196
3842541185
3842548127
3842548126
3842548122
3842548131
3842537776
3842548128
3842548118
3842548119
3842543480
3842541178
3842541175
3842541173
3842541181
3842541183
3842548123
3842548121
3842541187
3842543272
3842548120
3842543494
3842543311
�����������ߣ�����һ�ֹ����������������������ϣ�����������ƶ��ٶ��ǹ̶��ģ��������Ϸ������͵Ĺ�װ���������ʹ���ߵ�Ҫ������ƶ����ģ�������Ҫͣ����λ��ֹͣ�˶����ɲ����߽��и���װ����������������������ʹ����������ǰ�ƶ����͡����Ա���������Ҳ���Գ�Ϊ���������������ɽ������������������������
����ṹ�IJ���
ͨ������£����ӡ������ǹ������ϵģ�ֻ������������²�ʹ�ø��Ʋ��ϣ��������⣬���������Ϊ���Ʋ��ϡ�
����������ӷ�ʽ
�������������塢�����塢���ᡢ��Ͳ֮������ӷ�ʽ������ͨ�Ĺ�������һ���ġ�
���������֮���Ǽ�϶��ϣ�����֮����Է������ת�����Լ������ǹ���ʱ�֮���ĥ���������������������ͷdz���Ҫ�����ǣ�Ҫע����ǵ��и���ѹ�ڹ�����ʱ����ʹ���ֺ���֮��Ħ�����Ӵ�ʱ���Խ�����֮����Ϊ�������ӣ������������ת������
�������Ĺ���ԭ��
��������װ���Ͳ��ϣ�����������ǰ��ʱ���ͲĽӴ������Ա������Ĺ���ԭ�����£�
�� ��������ǰ��״̬����������ǰ����ͬʱ����ת����
�� ���и���ʱ�����ֺ��ӿ��Կ����Ǹ������ӡ���ˣ�������ǰ����ʱ�����һ��ת����
�� ���ظ������������ٶ�ǰ����ͬʱ�����ᱻ���ֵ���ת���Ÿ����ǰ����
������������
���������ĵ����Ͳģ�
�����Ͳ��DZ�Ʒ����ͬ���ٱȵı�������Ӧ�Ų�ͬ���Ͳģ������Լ���Ҫ��ѡȡ�Ϳ����ˣ�
�س̵���������Ƿ�ֹ�����ڽ��뵼���Ͳ�ʱ����ס��������Ҳ�DZ�Ʒ��ͬ���ģ������Լ�������ѡȡ��
�������������ˣ�
���������ͨ������������й̶���Ȼ�������������������ӣ�����Ϊ˫�ţ��ֱ��ڱ��������ֵ����ࣻ���ɹ��ֵ����ã����ξ��̴ӱ����������ߵ���������ʱ��������֧�Ź��ɵ����á�
�������ĴӶ��ˣ�
�Ӷ����ֺ�����������ȣ����˺�������ӷ�ʽ��ͬ����������һ���ġ�
��ͣ����
һ����Ӧ�ñ�����������ʱ�������������м����õ�ͣ���������ڽ��ξ���ֹͣ��ָ��λ�á�
�ξ��̵��ﵲͣ������ֹͣ�����ص������������Ƿ�ֹ�ξ��̻ص������ڶ�λ��
�����������ξ��̶���
��ͣ������ʵ����һ���赲���ף����ص�������ʵ��ֹ������
��ͣ�����������������ת�����ξ��̾������ص�����ʱ����ֹ����ѹ�£�
���ξ��̾�����ֹ�����ڵ��ɵ����������ϵ����������ξ����ڻص�ʱ�ͻ�ײ��ֹ���飬�Ӷ���ֹ�ص������á�
��������
������������ɣ��������������ɫ�Ķ������ŵ����ᶥ������ͬʱ�Ὣ��λ�������ξ�����Ӧ�Ķ�λ���У�����ʹ�ξ��̶����λ�ø��Ӿ�ȷ��
��������
���������ƶ��������ŵ������»�����������������Ƥ�������ߣ����ξ����ͽ�/�ͳ�����������
����ʽ������
���̶ֹ���������ķ����ϣ�Ȼ���ɵ��������ת�������ϵijݲ��������Ŀ��У�������������תʱ���Ϳ�����������ǰ����
�ִ��������ͻ�ϵͳ�Է������и��ߵ�Ҫ��Ϊ�ˣ��ڸ�ת�Ӵ�������ˮ������װ�ã��ڽ������ͻ��������з����ֻ�壬ϵͳ���ɵ���ɵģ���������ϵͳ�й����IJ�������������˵����Ҫ�������Լ��ֹܵĵ�����Ҫ�˽�ϵͳ������ϵ�������������ಿ����ɵģ�ֻ�����ø����������ճ�ά��������ʹ�䴦�����õĹ���״̬������ȷ���豸�İ�ȫ���У�
����һ�����ݴ�ʽ���ͻ���ʹ�ó����������������������ܼ�������������ȶ��IJ�ͬ�������������ҵ��������ʽ�����϶���õ�ͨ��Ƥ�����ͻ��⣬���ж������ͽṹ�����ֽ������ͻ������о��д����Ե���Ҫ�У�����Ǵ�ʽ������۴�ʽ���Լ�ѹ��ʽ������״��ʽ�������ʽ��ƽ��ת���ʽ����Ħ��ʽ����״�������ʹ�ʽ�����е�ȣ�����ϸ���ֿɴ��ڶ��ַ��ʽ���������½��ܣ�
����;���࣬��ͨ���ƶ�ʽ������ѡ��ʽ��¶����ù̶�ʽ�����ֽṹʽ��������ʽ���ͻ���װ�ػ�ר��ת�ع���ʽ�������ʽ���ͻ��ȣ�һ����˵�̾��볧��������������ˮƽ�����˻������ˣ����滨��ʽƤ������������˫���������ϣ����ۻ�ͨ����װ�ڶ��ϻ��ϣ����ɻ�ת����ʵ���������ϵ����ã������ż�֧�ŵĸܻ�ͨ���������ɢ�ϴ����豸��ͬʹ�ã�������ˮ�罨���е�Ӧ�ã������ñ��м��ܣ��û��������ڹ����ϣ��ɱ������ã�
���������ϵ���������࣬��һ����ɢ�����õģ���Ӳ�����õ��Լ����������õ�Ƥ�����ͻ��ȣ�������������ضε�λ�������࣬����Ƥ�����ض�������ĺͳ��ض���������Լ�ͬʱ���ض����������˫�����ͻ��������ͣ�ʹ��˫�����ͻ����Էֱ����Ϸ�֧���·�֧�������ϣ���Ϊ�˱������ϽӴ��治�����ı䣬��Ҫ�������ж��ڷ�ת��
�������ͻ�
���õĽ������ͻ��ɷ�Ϊ:��ͨ����о�������ͻ�������о��ǿ�Ƚ��������ȫ�������˽������ͻ�����ȼ�ͽ������ͻ���˫��˫�˽������ͻ��������ƶ�ʽ�������ͻ����ͺ��������ͻ��ȵȡ�
Ƥ�����ͻ���Ҫ�ɻ��ܡ�����Ƥ����Ƥ����Ͳ���Ž�װ�á�����װ�õ���ɴ�ʽ���ͻ��ֳƽ������ͻ����㷺Ӧ���ڼҵ硢���ӡ���������е���̲ݡ�ע�ܡ��ʵ硢ӡˢ��ʳƷ�ȸ��и�ҵ���������װ����⡢���ԡ���װ������ȡ�
���ͻ�е��ʹ�õ���;�ֿ��Է�Ϊ��ɢ�����ͻ�е(��:��ʽ���ͻ�\�������ͻ�\��ʽ������\��������ͻ���)���������ͻ�е����:��ˮ��,��ˮ���豸,������,����������,������,����������,����ʽ������,����ʽ,������,�������ͻ�,����������
��ʿ��REXROTH�˸Ǻ���
1����ʿ��REXROTH�˸�
3842548847
3842548846
3842518377
3842548701
3842548702
3842511874
3842548743
3842548742
3842548745
3842548744
3842548747
3842548746
3842548749
3842548748
3842548753
3842548752
3842518205
3842524414
3842548755
3842548754
3842548757
3842548756
3842548809
3842548808
3842548761
3842548760
3842548759
3842548758
2����ʿ��REXROTH����
3842523258
3842518369
3842548877
3842548876
3842548879
3842548878
�ġ���ʿ��REXROTH���ʽԪ��
1����ʿ��REXROTHƽ�źͶ˸�
3842536321
3842548797
3842548796
3842352061
3842511893
3842529025
3842311951
3842502257
2����ʿ��REXROTH����
3842541228
3842541226
3842541236
3842541234
3842515459
3����ʿ��REXROTH����֧��
3842527553
3842146815
3842146848
8981003224
3842523583
3842526560
�塢��ʿ��REXROTH�������
3842518351
3842184738
3842518347
3842544531
3842146906
3842305768
3842525766
3842544554
3842525480
3842305767
3842519565
3842519567
3842544505
3842305766
3842515244
3842516165
3842544502
3842544504
3842518738
3842548834
3842548832
3842548840
������ʿ��REXROTH�ֹ�����ϵͳ
1����ʿ��REXROTH����վ���
��1����ʿ��REXROTH�ƾߡ����º�����
3842537558
3842537599
3842537323
3842539882
3842537345
3842526564
3842526565
3842523014
3842517164
3842537870
3842537650
3842537651
3842539839
3842537351
3842514653
3842532909
��2����ʿ��REXROTH���ܺ͵���
3842521513
3842537861
3842523598
3842521510
3842218953
0842901309
3842540429
3842544835
3842544836
3842544834
3842544837
3842546744
3842546745
3842530306
3842544797
3842544770
3842544832
3842544833
3842544772
3842544768
��3����ʿ��REXROTH�������幤ѧ������
3842546774
3842546772
3842546775
3842537135
3842527161
3842546768
3842546769
3842546763
3842546766
��4����ʿ��REXROTH����
3842548900
3842546535
3842547886
3842547887
3842547885
2����ʿ��REXROTH����ʽ����ϵͳ
3842532862
3842536002
3842535122
3842535121
3842537657
3842537661
3842537660
3842538372
3842537687
3842532865
3842532867
3842532886
3842532887
38423195011
3842319500
3842537777
3842537776
3842535118
3842535115
�ߡ���ʿ��REXROTH��Ʒ
3842513581
3842513582
3842517179
3842517173
3842537816
3842517178
3842509178
3842501574
3842502538
3842512603
3842512930
3842529339
3842529340
3842529341
3842529342
3842509175
8981004744
8981004773
3842315100
3842507125
3842511702
3842506957
3842506961
3842506959
3842506963
3842315122
3842507127
3842511782
3842511781
3842315123
3842507123
3842315126
3842507716
3842511872
3842511871
3842509658
3842509659
3842315125
3842507715
3842506949
3842506953
3842506951
3842506955
3842517200
3842517199
3842315124
3842507124
3842537100
3842537101
��ҵ�������ǹ㷺���ڹ�ҵ����Ķ�ؽڻ�е�ֻ�����ɶȵĻ���װ�ã�����һ�����Զ��ԣ������������Ķ�����Դ�Ϳ�������ʵ�ָ��ֹ�ҵ�ӹ����칦�ܡ���ҵ�����˱��㷺Ӧ���ڵ��ӡ������������ȸ�����ҵ����֮�С�
һ����˵����ҵ������������������ϵͳ��ɡ�
�����ǻ�е���֡����в��ֺͿ��Ʋ��֡�
������ϵͳ�ɷ�Ϊ��е�ṹϵͳ������ϵͳ����֪ϵͳ��������-��������ϵͳ���˻�����ϵͳ�Ϳ���ϵͳ��
1.��е�ṹϵͳ
�ӻ�е�ṹ��������ҵ�����������Ϸ�Ϊ���������˺Ͳ��������ˡ����������˵��ص���һ������˶���ı���һ���������ԭ�㣬������������һ�����˶���ı���һ���������ԭ�㡣���ڵĹ�ҵ�����˶��Dz��ô���������������������Ϊ��ƽ̨�Ͷ�ƽ̨ͨ�����������������˶��������ӣ��������������������������ɶȣ����Բ�����ʽ������һ�ֱջ������������������������ɲ��֣��ֱ���������ֱۡ��ֱۻ����Ի�ռ��кܴ��Ӱ�죬�������ǹ��ߺ���������Ӳ��֡��봮����������Ƚϣ����������˾��иնȴṹ�ȶ������������������ȸߡ��˶�����С���ŵ㡣��λ������ϣ����������˵��������ף�������ʮ�����ѣ����������������෴�����������ѣ�����ȴ�dz����ס�
2.����ϵͳ
����ϵͳ�����е�ṹϵͳ�ṩ������װ�á����ݶ���Դ��ͬ������ϵͳ�Ĵ�����ʽ��ΪҺѹʽ����ѹʽ������ʽ�ͻ�еʽ4�֡����ڵĹ�ҵ�����˲���Һѹ����������Һѹϵͳ����й¶�������͵��ٲ��ȶ������⣬���ҹ��ʵ�Ԫ���غͰ���Ŀǰֻ�д������ػ����ˡ������ӹ������˺�һЩ����Ӧ�ó���ʹ��Һѹ�����Ĺ�ҵ�����ˡ���ѹ���������ٶȿ졢ϵͳ�ṹ��ά���㡢�۸�͵��ŵ㡣������ѹװ�õĹ���ѹǿ�ͣ�����λ��һ������ڹ�ҵ������ĩ��ִ������������������ץ����ת��������������Ϊĩ��ִ�����������С�С���ɵĹ���ץȡ��װ�䡣����������Ŀǰʹ�ö��һ��������ʽ�����ص��ǵ�Դȡ�÷��㣬��Ӧ�죬���������źż�⡢���ݡ��������㣬�����Բ��ö������Ŀ��Ʒ�ʽ���������һ����ò���������ŷ������ĿǰҲ�в���ֱ�����������������۽ϸߣ�����Ҳ��Ϊ���ӣ��͵������ļ�����һ�����г�����������������ּ������������dz��ּ����������ڲ������������д�����ֱ����������ֱ�ߵ���ڲ��������������Ѿ��õ��˹㷺Ӧ�á�
3.��֪ϵͳ
�����˸�֪ϵͳ�ѻ����˸����ڲ�״̬��Ϣ�ͻ�����Ϣ���ź�ת��Ϊ������������������֮���ܹ������Ӧ�õ����ݺ���Ϣ��������Ҫ��֪����������״̬��صĻ�е������λ�ơ��ٶȺ����ȣ��Ӿ���֪�����ǹ�ҵ�����˸�֪��һ����Ҫ���档�Ӿ��ŷ�ϵͳ���Ӿ���Ϣ��Ϊ�����źţ����ڿ��Ƶ��������˵�λ�ú���̬�������Ӿ�ϵͳ����������⡢ʶ����ʳƷ�ּ𡢰�װ�ĸ�������õ��˹㷺Ӧ�á���֪ϵͳ���ڲ�������ģ����ⲿ������ģ����ɣ����ܴ�������ʹ������˻����˵Ļ����ԡ���Ӧ�Ժ����ܻ�ˮƽ��
4. ������-��������ϵͳ
������-��������ϵͳ��ʵ�ֻ��������ⲿ�����е��豸���ϵ��Э����ϵͳ�����������ⲿ�豸����Ϊһ�����ܵ�Ԫ����ӹ����쵥Ԫ�����ӵ�Ԫ��װ�䵥Ԫ�ȡ���ȻҲ�����Ƕ�̨�����˼���Ϊһ��ȥִ�и�������Ĺ��ܵ�Ԫ��
5.�˻�����ϵͳ
�˻�����ϵͳ����������˽�����ϵ�Ͳ�������˿��Ƶ�װ�á����磺������ı��նˡ�ָ�����̨����Ϣ��ʾ�塢Σ���źű������ȡ� [3]
6.����ϵͳ
����ϵͳ�������Ǹ��ݻ����˵���ҵָ���Լ��Ӵ����������������źţ�֧������˵�ִ�л���ȥ��ɹ涨���˶����ܡ���������˲��߱���Ϣ������������Ϊ��������ϵͳ���߱���Ϣ������������Ϊ�ջ�����ϵͳ�����ݿ���ԭ���ɷ�Ϊ�������ϵͳ����Ӧ�Կ���ϵͳ���˹����ܿ���ϵͳ�����ݿ����˶�����ʽ�ɷ�Ϊ��λ���ƺ������켣���ơ�
�ڹ�ҵ�����У������װ����һ���������Ĺ�������Ҫ�������Ͷ���������������װ����Ϊ�����ʸߣ�Ч�ʵͶ�����ҵ�����˴��档װ������˵��з�������˶��ּ���������ͨѶ�������Զ����ơ���ѧԭ�������Ӽ����ȡ��з���Ա����װ�����̣���д���ʵij���Ӧ���ھ����װ�乤����װ������˵Ĵ��ص㣬���ǰ�װ���ȸߡ�����Դ����ó̶ȸߡ���Ϊװ�乤�����Ӿ�ϸ����������ѡ��װ������������е��������������ϸ�����İ�װ��
 ɨһɨ���ֻ����
ɨһɨ���ֻ����