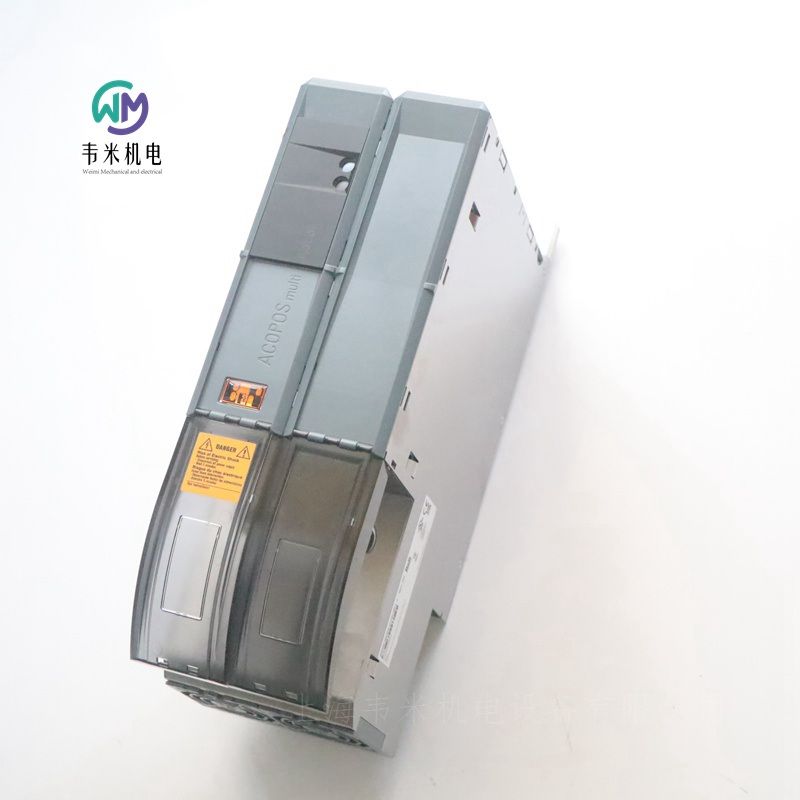
��ʿ���ŷ����MHD093C-058-PP0-RA R911308217���Ϻ�Τ�����豸����˾��Ӫ���۲�Ʒ��ԭ��ԭװ���������ϣ��������ߣ� �����棺 ����ϵ�ˣ����ࡣ�ȳϻ�ӭ���Ͽͻ���ѯ����
�ŷ��������ԭ��
1.�ŷ���Ҫ����������λ������.�Ͽ����������⣬�ŷ�������յ�1�����壬�ͻ���ת1�������Ӧ�ĽǶȣ��Ӷ�ʵ��λ�ƣ���Ϊ���ŷ���������߱���������Ĺ��ܣ������ŷ����ÿ��ת-һ���Ƕȣ����ᷢ����Ӧ���������壬���������ŷ�������ܵ������γ��˺�Ӧ�����߽бջ������һ����ϵͳ�ͻ�֪�����˶���������ŷ������ͬʱ�����˶���������������������ܹ��ܾ�ȷ�Ŀ��Ƶ����ת�����Ӷ�ʵ�־�ȷ�Ķ�λ�����Դﵽ0.001mm��ֱ���ŷ������Ϊ��ˢ����ˢ�������ˢ����ɱ��ͣ��ṹ������ת�ش��ٷ�Χ�����������ף���Ҫά������ά������(��̼ˢ)��������Ÿ��ţ��Ի�����Ҫ��������������ڶԳɱ����е���ͨ��ҵ�����ó��ϡ���ˢ������С�� �����ᣬ��������Ӧ�죬�ٶȸߣ�����С��ת��ƽ���������ȶ������Ƹ��ӣ�����ʵ�����ܻ�������ӻ��ʽ�����Է�����������Ҳ����ࡣ�����ά����Ч�ʺܸߣ������¶ȵͣ���ŷ����С���������������ڸ��ֻ�����
2. �����ŷ����Ҳ����ˢ���,��Ϊͬ�����첽�����Ŀǰ�˶�������һ�㶼��ͬ����������Ĺ��ʷ�Χ���������ܴ�Ĺ��ʡ��������ת���ٶȵͣ������Ź�����������ٽ��͡�����ʺ�������ƽ�����е�Ӧ�á�
3.�ŷ�����ڲ���ת���������������������Ƶ�UNNN������γɵ�ų���ת���ڴ˴ų���������ת����ͬʱ����Դ��ı����������źŸ������������������ݷ���ֵ��Ŀ��ֵ���бȽϣ�����ת��ת���ĽǶȡ��ŷ�����ľ��Ⱦ����ڱ������ľ���(����)��
1.�ŷ���Ҫ����������λ�������Ͽ����������⣬�ŷ�������յ�1�����壬�ͻ���ת1�������Ӧ�ĽǶȣ��Ӷ�ʵ��λ�ƣ���Ϊ���ŷ���������߱���������Ĺ��ܣ������ŷ����ÿ��ת-���Ƕȣ����ᷢ����Ӧ���������壬���������ŷ�������ܵ������γ��˺�Ӧ�����߽бջ������һ����ϵͳ�ͻ�֪�����˶���������ŷ������ͬʱ�����˶���������������������ܹ��ܾ�ȷ�Ŀ��Ƶ����ת�����Ӷ�ʵ�־�ȷ�Ķ�λ�����Դﵽ0.001mm��
ֱ���ŷ������Ϊ��ˢ����ˢ�������ˢ����ɱ��ͣ��ṹ������ת�ش��ٷ�Χ�����������ף���Ҫά������ά������(��̼ˢ)��������Ÿ��ţ��Ի�����Ҫ��������������ڶԳɱ����е���ͨ��ҵ�����ó��ϡ�
��ˢ������С�������ᣬ��������Ӧ�죬�ٶȸߣ�����С��ת��ƽ���������ȶ������Ƹ��ӣ�����ʵ�����ܻ�������ӻ��ʽ�����Է�����������Ҳ����ࡣ�����ά����Ч�ʺܸߣ������¶ȵͣ���ŷ����С���������������ڸ��ֻ�����
2.�����ŷ����Ҳ����ˢ�������Ϊͬ�����첽�����Ŀǰ�˶�������һ�㶼��ͬ����������Ĺ��ʷ�Χ���������ܴ�Ĺ��ʡ��������ת���ٶȵͣ������Ź�����������ٽ��͡�����ʺ�������ƽ�����е�Ӧ�á�
3.�ŷ�����ڲ���ת�������������������Ƶ�UNNN������γɵ�ų���ת���ڴ˴ų���������ת����ͬʱ����Դ��ı����������źŸ������������������ݷ���ֵ��Ŀ��ֵ���бȽϣ�����ת��ת���ĽǶȡ��ŷ�����ľ��Ⱦ����ڱ������ľ���(����)��
�ŷ��綯���ֳ�ִ�е綯�������Զ�����ϵͳ�У�����ִ��Ԫ���������յ��ĵ��ź�ת���ɵ綯�����ϵĽ�λ�ƻ���ٶ��������Ϊֱ���ͽ����ŷ��綯�������࣬����Ҫ�ص��ǣ����źŵ�ѹΪ��ʱ����ת����ת������ת�ص����Ӷ������½�
�����ŷ�Ҫ��һЩ����Ϊ�����Ҳ����ƣ�ת������С��ֱ���ŷ������β�����ֱ���ŷ��Ƚϼ����ˡ�
��ʿ���ŷ����MHD093C-058-PP0-RA R911308217���¹�REXROTH�ŷ������
��ʿ��REXROTH�ŷ����
R911311706 MHD093C-024-NG0-AA
R911306746 MHD093C-024-NG0-BA
R911306779 MHD093C-024-NG0-BN
R911313132 MHD093C-024-NG1-AA
R911310660 MHD093C-024-NG1-BA
R911321041 MHD093C-024-NG1-BN
R911308882 MHD093C-024-NP0-AA
R911309899 MHD093C-024-NP0-AN
R911307695 MHD093C-024-NP0-BA
R911315628 MHD093C-024-NP0-LA
R911307696 MHD093C-024-NP1-BA
R911309925 MHD093C-024-PG0-AA
R911319987 MHD093C-024-PG0-BA
R911314007 MHD093C-024-PG0-BN
R911309759 MHD093C-024-PG1-BA
R911307401 MHD093C-024-PG1-BN
R911315973 MHD093C-024-PG2-BA
R911309908 MHD093C-024-PP0-AA
R911299361 MHD093C-024-PP0-BA
R911309924 MHD093C-024-PP1-AA
R911309577 MHD093C-024-PP1-BA
R911286328 MHD093C-035-NG0-AA
R911272232 MHD093C-035-NG0-AN
R911287589 MHD093C-035-NG0-BA
R911273949 MHD093C-035-NG0-BN
R911293863 MHD093C-035-NG0-LA
R911293864 MHD093C-035-NG0-RA
R911286330 MHD093C-035-NG1-AA
R911282225 MHD093C-035-NG1-AN
R911289227 MHD093C-035-NG1-BA
R911283824 MHD093C-035-NG1-BN
R911283777 MHD093C-035-NG1-LN
R911288551 MHD093C-035-NP0-AA
R911277118 MHD093C-035-NP0-AN
R911286676 MHD093C-035-NP0-BA
R911276455 MHD093C-035-NP0-BN
R911288464 MHD093C-035-NP1-AA
R911279129 MHD093C-035-NP1-AN
R911289557 MHD093C-035-NP1-BA
R911278234 MHD093C-035-NP1-BN
R911296272 MHD093C-035-NP1-RA
R911288821 MHD093C-035-PG0-AA
R911279860 MHD093C-035-PG0-AN
R911284769 MHD093C-035-PG0-AN/S020
R911285576 MHD093C-035-PG0-BA
R911277309 MHD093C-035-PG0-BN
R911279419 MHD093C-035-PG0-RN
R911287343 MHD093C-035-PG1-AA
R911272553 MHD093C-035-PG1-AN
R911287056 MHD093C-035-PG1-AN/S020
R911286602 MHD093C-035-PG1-BA
R911281819 MHD093C-035-PG1-BN
R911284036 MHD093C-035-PG1-BN/S020
R911309535 MHD093C-035-PG1-LA
R911295540 MHD093C-035-PG1-RA
R911284826 MHD093C-035-PP1-AN
R911287899 MHD093C-035-PP1-BA
R911280610 MHD093C-035-PP1-BN
R911319654 MHD093C-035-PP2-AA
R911317437 MHD093C-035-PP2-BA
R911287467 MHD093C-058-NG0-AA
R911277851 MHD093C-058-NG0-AN
R911288030 MHD093C-058-NG0-BA
R911276305 MHD093C-058-NG0-BN
R911289582 MHD093C-058-NG0-LA
R911287564 MHD093C-035-PG1-RN
R911297658 MHD093C-035-PG2-AA
R911309678 MHD093C-035-PG2-AN
R911297674 MHD093C-035-PG2-BA
R911321725 MHD093C-035-PG2-BN
R911289561 MHD093C-035-PP0-AA
R911283965 MHD093C-035-PP0-AN
R911287934 MHD093C-035-PP0-BA
R911278495 MHD093C-035-PP0-BN
R911287574 MHD093C-035-PP1-AA
R911283336 MHD093C-058-NG0-LN
R911286877 MHD093C-058-NG0-RA
R911283001 MHD093C-058-NG0-RN
R911286878 MHD093C-058-NG1-AA
R911280135 MHD093C-058-NG1-AN
R911290148 MHD093C-058-NG1-BA
R911276306 MHD093C-058-NG1-BN
R911310403 MHD093C-058-NG2-BA
R911287363 MHD093C-058-NP0-AA
R911279826 MHD093C-058-NP0-AN
R911287127 MHD093C-058-NP0-BA
R911279156 MHD093C-058-NP0-BN
R911290956 MHD093C-058-NP1-AA
R911279827 MHD093C-058-NP1-AN
R911293939 MHD093C-058-NP1-BA
R911282753 MHD093C-058-NP1-BN
R911289796 MHD093C-058-NP1-LA
R911288541 MHD093C-058-PG0-AA
R911283054 MHD093C-058-PG0-AN
R911286162 MHD093C-058-PG0-BA
R911274894 MHD093C-058-PG0-BN
R911295680 MHD093C-058-PG0-LA
R911295679 MHD093C-058-PG0-RA
R911287231 MHD093C-058-PG1-AA
R911273523 MHD093C-058-PG1-AN
R911285954 MHD093C-058-PG1-BA
R911275800 MHD093C-058-PG1-BN
R911307308 MHD093C-058-PG2-AA
R911306744 MHD093C-058-PG2-AN
R911306085 MHD093C-058-PG2-BA
R911287598 MHD093C-058-PP0-AA
R911279862 MHD093C-058-PP0-AN
R911287824 MHD093C-058-PP0-BA
R911275663 MHD093C-058-PP0-BN
R911293816 MHD093C-058-PP0-BP
R911308218 MHD093C-058-PP0-LA
R911308217 MHD093C-058-PP0-RA
R911287784 MHD093C-058-PP1-AA
R911283779 MHD093C-058-PP1-AN
R911287626 MHD093C-058-PP1-BA
R911277196 MHD093C-058-PP1-BN
R911290882 MHD093C-058-PP1-LA
R911315210 MHD093C-058-PP1-RN
R911296838 MHD093C-058-PP2-AA
R911306121 MHD093C-058-PP2-BA
�ŷ�ϵͳ�Ǿ��з����ıջ��Զ�����ϵͳ�������ɿ���������������װ�á�����װ�ú͵綯����ɵġ������ŷ��������Խ���λ�á��ٶȡ�ת�صĵ�����Ƽ���Ͽ���
ת�ؿ��ƣ� ͨ���ⲿģ�����������ֱ�ӵĵ�ַ�ĸ�ֵ���趨��� ���������ת�صĴ�С����ҪӦ������Ҫ�ϸ����ת�صij��ϡ�——����������
�ٶȿ��ƣ�ͨ��ģ����������������Ƶ�ʶ�ת���ٶȵĿ��ơ� ——�ٶȻ���
λ�ÿ��ƣ� �ŷ��г��õĿ��ƣ�λ�ÿ���ģʽһ����ͨ���ⲿ����������Ƶ����ȷ��ת���ٶȵĴ�С��ͨ������ĸ�����ȷ��ת���ĽǶ�,����һ��Ӧ���ڶ�λװ�� �� ——��������
�����ŷ�����ϵͳ���ܵ���Ҫָ����Ƶ�����Ⱥ;��ȡ�Ƶ�����ȼ�ƴ�������ϵͳƵ����Ӧ�������涨����ӳ�ŷ�ϵͳ�ĸ��ٵĿ����ԡ�����Խ������Խ�á��ŷ�ϵͳ�Ĵ�����Ҫ�ܿ��ƶ����ִ�л����Ĺ��Ե����ơ�����Խ����Խխ���ŷ�ϵͳ����ָ������������������ź�Ҫ��ľ�ȷ�̶�,��������ʽ����,�ɸ���Ϊ��̬���,��̬���;�̬�������������ɡ�
�ŷ����������Ƶ���IJ���
��Ƶ�����ŷ��Ŵ���������·����ƻ�·�ϵ��������£�
����·����Ƶ�����ŷ��Ĺ��ɻ�����ͬ�����ߵ����������ŷ��������˳�Ϊ��̬�ƶ����IJ�����ֹͣʱ�ò����������ŷ�������۵Ĺ������������ŷ���������ƶ���
���ƻ�·�����Ƶ����ȣ��ŷ��Ĺ����൱���ӡ�Ϊ��ʵ���ŷ���������Ҫ���ӵķ���������ģʽ�л������ƣ�����/�ٶ�/ת�أ��ȹ��ܡ�
�ŷ����������Ƶ�������ܼ�Ӧ�÷�����Ҫ�������£�
���ƾ��Ȳ�ͬ
�����ŷ�����Ŀ��ƾ����ɵ�����˵���ת��������֤��
��Ƶ���Բ�ͬ
�����ŷ������ת�dz�ƽ�ȣ���ʹ�ڵ���ʱҲ�������������.��0.2r/MINת�����Կ��϶������ƽ����ת�����ٱȿɴﵽ1:10000�����DZ�Ƶ��ԶԶ�ﲻ���ġ�
���й���������ͬ
�ŷ�������һ����ж�ʱ3�����������������ڿ˷����Ը���������˲��Ĺ������ء���Ƶ��һ������1.5�����ء�
�Ӽ������ܲ�ͬ
�ڿ���������ŷ�����Ӿ�ֹ״̬���ٵ�2000r/min����ʱ���ᳬ20mS������ļ���ʱ��������Ĺ����Լ������й�ϵ��ͨ����������Խ�����ʱ��Խ����
��̬��ӦƷ������
�ŷ������λ�ÿ���ģʽ�£�ͻ�Ӹ��ػ��أ�����û�г��������ת�ٲ��������������֤�˻����ӹ��ľ��ȡ�
��������ͬ
��Ƶ�����������ƽ����첽������ŷ��������������ƽ�������ͬ��������ŷ�ϵͳ�����ܲ���ȡ���������������ܣ����Ҹ��ŷ������������ֱ�ӵĹ�ϵ���ŷ�����IJ��ϡ��ṹ�ͼӹ�����ҪԶԶ���ڱ�Ƶ�������Ľ�������������������ز���Ҳ���������ܲ�ͬ�ĸ�����
Ӧ�ó��ϲ�ͬ
��Ƶ�������ŷ���������������Ŀ��ơ�ǰ�����ڴ�����������,���������˶���������һ��������һ�㹤ҵӦ��Ҫ������ָ��Ҫ�ߵ�Ӧ�ó��ϣ���ͳɱ�����ά����ʹ�ü��ص��������Ʒ����һ�����Ǵ����Ź�ҵ�Զ�����չˮƽ�IJ�Ʒ��������ܡ�����Ӧ���߾��� ��
�ŷ��ͱ�Ƶ����ʹ��Ŀ�ġ����ܷ�����ڱ��ʵIJ��졣ѡ����һ��ȡ��������ģʽ�������������۸�����ء�
 ɨһɨ���ֻ����
ɨһɨ���ֻ����