�������ŷ����ƿ�8AC123.60-1��������B&R����ʽģ�飬�Ϻ�Τ�����豸����˾��Ӫ���۲�Ʒ��ԭ��ԭװ���������ϣ��ȳϻ�ӭ���Ͽͻ���ѯ����
���ϱ�ţ�
8AC123.60-1��
˵����
���ڰ�װ��ACOPOS�ŷ��������е�������������SSI���Ա������ӿ�
��ر����������ź�
��������Դ��ѹ5V��15V
����5V�����������ѹ�µĵ�ѹ��
ACOPOS���ģ�顢������������SSI���Ա������ӿ�
�ŷ����������ܿ������Ŀ���ָ�Ȼ��ͨ���������������ŷ���������ŷ������ʵʱλ�ã�ͨ�����������·������ŷ����������γɱջ����ơ�����Ȼ������ģʽ�£��ŷ������������ϳ䵱�˷Ŵ����Ľ�ɫ�����Ǿ����ŷ��Ĺ���ģʽ��
���巽ʽ
��λ��ͨ���������嵽�ŷ�����������ʵ�ֿ��ơ������ַ�ʽ�£�������Ƶ���������ٶȣ����������������λ�á�ͬ�����ŷ�������Ҳ�ᷢ������������������λ�����ŷ������λ�ú��ٶȡ�
���磬����Լ���ŷ����10000��������תһȦ����ô������λ������10000�����壬�ŷ������תһȦ��ʵ��λ�ÿ��ơ������λ����һ�����ڷ�����10000�����壬��ô�ŷ�������ٶȾ���1r/min,���ʵ��һ�����ڷ��꣬��ô�ŷ�������ٶȾ���1r/s��Ҳ����60r/min��
�Ͷ�PLC������ϵͳ���Լ����ֵ�Ƭ��ϵͳһ�㶼�Dz�������ģʽ�������У��ɱ�����������Ȼ�����ŷ��������ӣ����ֿ��Ʒ�ʽ��ȱ��ͻ����ֳ�������λ��Ӳ���ɱ������ӣ�����ܸ��ӣ������ֳ�EMC���õĻ������弫��ʧ�����ԣ�����ģʽһ����������һ�£����ԣ���PLC���������������������������ᣬ���ٲ���PLC����ʵ�����ᡣ
ͨѶ��ʽ
ͨѶ��ʽ����ר��Ϊ������巽ʽ�IJ���������ģ��Ѿ���Ϊһ�ַ�չ���ƣ�����������������Ƶ��ͨ��ͨѶ�ķ�ʽ�������ŷ������������ַ�ʽ�������Դ����ŷ������λ����Ϣ�����ܴ��ݸ���״̬��Ϣ�������ŷ�����ĵ�����Ť���Լ��ŷ��������Ĺ��ϴ���ȵȣ�����Ȼ�����������ʱ�����ַ�ʽ�����Ʋ��Զ�����
�����˶����Ƶ������ԣ����Բ�ͬ�ij��Ҷ��Ƴ��Լ����˶��������ߣ����п��ŵģ�Ҳ�з�յġ�
��ȻͨѶ����ʽ���࣬�����ǽ����һ�㶼��ʵʱ�����⣬��Ϊ�����˶�������˵��ʵʱ���Ƿdz���Ҫ�ġ���Ӧ�ÿ����ĽǶ���˵�������ͨѶ��û������ģ�ֻ���źŴ��ݵ���ʽ�����˱仯��
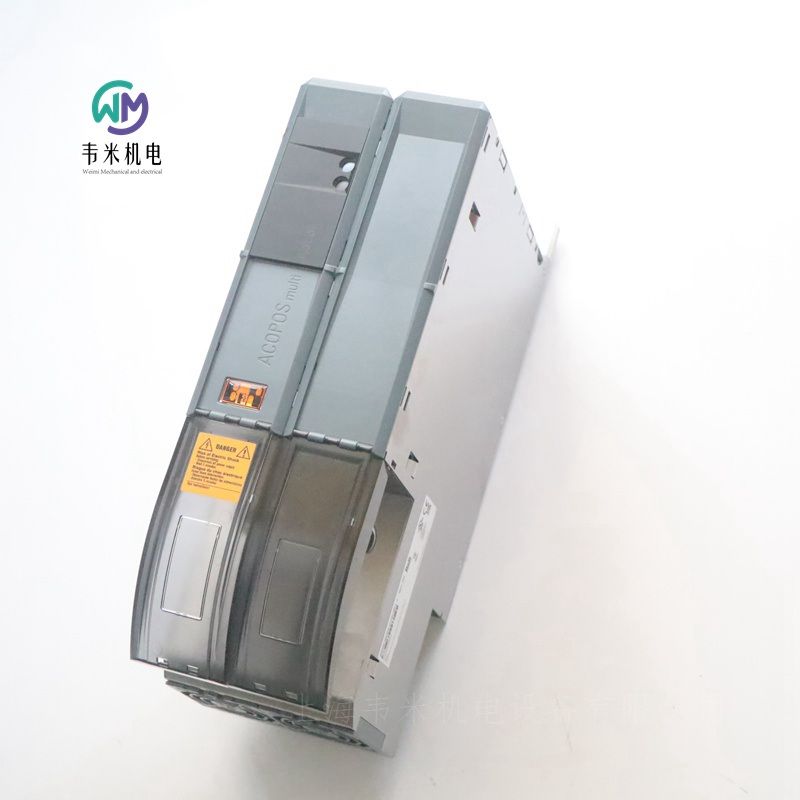
�������ŷ����ƿ�8AC123.60-1
������ACOPOS�����ŷ�������
�������ŷ�������
8V1010.001-2
8V1010.00-2
8V1010.501-2
8V1010.50-2
8V1016.001-2
8V1016.00-2
8V1016.501-2
8V1016.50-2
8V1022.001-2
8V1022.00-2
8V1045.001-2
8V1045.00-2
8V1090.001-2
8V1090.00-2
8V1180.001-2
8V1180.00-2
8V128M.001-2
8V128M.00-2
8V1320.001-2
8V1320.00-2
8V1640.001-2
8V1640.00-2
����������ʽģ��
8AC110.60-2
8AC110.60-3
8AC112.60-1
8AC114.60-2
8AC120.60-1
8AC121.60-1
8AC122.60-3
8AC122.60-4
8AC123.60-1
8AC125.60-1
8AC125.60-2
8AC125.61-2
8AC126.60-1
8AC130.60-1
8AC131.60-1
8AC140.60-2
8AC140.60-3
8AC140.61-2
8AC140.61-3
8AC141.60-2
8AC141.61-3
��ҵ�������ǹ㷺���ڹ�ҵ����Ķ�ؽڻ�е�ֻ�����ɶȵĻ���װ�ã�����һ�����Զ��ԣ������������Ķ�����Դ�Ϳ�������ʵ�ָ��ֹ�ҵ�ӹ����칦�ܡ���ҵ�����˱��㷺Ӧ���ڵ��ӡ������������ȸ�����ҵ����֮�С�
һ����˵����ҵ������������������ϵͳ��ɡ�
�����ǻ�е���֡����в��ֺͿ��Ʋ��֡�
������ϵͳ�ɷ�Ϊ��е�ṹϵͳ������ϵͳ����֪ϵͳ��������-��������ϵͳ���˻�����ϵͳ�Ϳ���ϵͳ��
1.��е�ṹϵͳ
�ӻ�е�ṹ��������ҵ�����������Ϸ�Ϊ���������˺Ͳ��������ˡ����������˵��ص���һ������˶���ı���һ���������ԭ�㣬������������һ�����˶���ı���һ���������ԭ�㡣���ڵĹ�ҵ�����˶��Dz��ô���������������������Ϊ��ƽ̨�Ͷ�ƽ̨ͨ�����������������˶��������ӣ��������������������������ɶȣ����Բ�����ʽ������һ�ֱջ������������������������ɲ��֣��ֱ���������ֱۡ��ֱۻ����Ի�ռ��кܴ��Ӱ�죬�������ǹ��ߺ���������Ӳ��֡��봮����������Ƚϣ����������˾��иնȴṹ�ȶ������������������ȸߡ��˶�����С���ŵ㡣��λ������ϣ����������˵��������ף�������ʮ�����ѣ����������������෴�����������ѣ�����ȴ�dz����ס�
2.����ϵͳ
����ϵͳ�����е�ṹϵͳ�ṩ������װ�á����ݶ���Դ��ͬ������ϵͳ�Ĵ�����ʽ��ΪҺѹʽ����ѹʽ������ʽ�ͻ�еʽ4�֡����ڵĹ�ҵ�����˲���Һѹ����������Һѹϵͳ����й¶�������͵��ٲ��ȶ������⣬���ҹ��ʵ�Ԫ���غͰ���Ŀǰֻ�д������ػ����ˡ������ӹ������˺�һЩ����Ӧ�ó���ʹ��Һѹ�����Ĺ�ҵ�����ˡ���ѹ���������ٶȿ졢ϵͳ�ṹ��ά���㡢�۸�͵��ŵ㡣������ѹװ�õĹ���ѹǿ�ͣ�����λ��һ������ڹ�ҵ������ĩ��ִ������������������ץ����ת��������������Ϊĩ��ִ�����������С�С���ɵĹ���ץȡ��װ�䡣����������Ŀǰʹ�ö��һ��������ʽ�����ص��ǵ�Դȡ�÷��㣬��Ӧ�죬���������źż�⡢���ݡ��������㣬�����Բ��ö������Ŀ��Ʒ�ʽ���������һ����ò���������ŷ������ĿǰҲ�в���ֱ�����������������۽ϸߣ�����Ҳ��Ϊ���ӣ��͵������ļ�����һ�����г�����������������ּ������������dz��ּ����������ڲ������������д�����ֱ����������ֱ�ߵ���ڲ��������������Ѿ��õ��˹㷺Ӧ�á�
3.��֪ϵͳ
�����˸�֪ϵͳ�ѻ����˸����ڲ�״̬��Ϣ�ͻ�����Ϣ���ź�ת��Ϊ������������������֮���ܹ������Ӧ�õ����ݺ���Ϣ��������Ҫ��֪����������״̬��صĻ�е������λ�ơ��ٶȺ����ȣ��Ӿ���֪�����ǹ�ҵ�����˸�֪��һ����Ҫ���档�Ӿ��ŷ�ϵͳ���Ӿ���Ϣ��Ϊ�����źţ����ڿ��Ƶ��������˵�λ�ú���̬�������Ӿ�ϵͳ����������⡢ʶ����ʳƷ�ּ𡢰�װ�ĸ�������õ��˹㷺Ӧ�á���֪ϵͳ���ڲ�������ģ����ⲿ������ģ����ɣ����ܴ�������ʹ������˻����˵Ļ����ԡ���Ӧ�Ժ����ܻ�ˮƽ��
4. ������-��������ϵͳ
������-��������ϵͳ��ʵ�ֻ��������ⲿ�����е��豸���ϵ��Э����ϵͳ�����������ⲿ�豸����Ϊһ�����ܵ�Ԫ����ӹ����쵥Ԫ�����ӵ�Ԫ��װ�䵥Ԫ�ȡ���ȻҲ�����Ƕ�̨�����˼���Ϊһ��ȥִ�и�������Ĺ��ܵ�Ԫ��
5.�˻�����ϵͳ
�˻�����ϵͳ����������˽�����ϵ�Ͳ�������˿��Ƶ�װ�á����磺������ı��նˡ�ָ�����̨����Ϣ��ʾ�塢Σ���źű������ȡ� [3]
6.����ϵͳ
����ϵͳ�������Ǹ��ݻ����˵���ҵָ���Լ��Ӵ����������������źţ�֧������˵�ִ�л���ȥ��ɹ涨���˶����ܡ���������˲��߱���Ϣ������������Ϊ��������ϵͳ���߱���Ϣ������������Ϊ�ջ�����ϵͳ�����ݿ���ԭ���ɷ�Ϊ�������ϵͳ����Ӧ�Կ���ϵͳ���˹����ܿ���ϵͳ�����ݿ����˶�����ʽ�ɷ�Ϊ��λ���ƺ������켣���ơ�
�ڹ�ҵ�����У������װ����һ���������Ĺ�������Ҫ�������Ͷ���������������װ����Ϊ�����ʸߣ�Ч�ʵͶ�����ҵ�����˴��档װ������˵��з�������˶��ּ���������ͨѶ�������Զ����ơ���ѧԭ�������Ӽ����ȡ��з���Ա����װ�����̣���д���ʵij���Ӧ���ھ����װ�乤����װ������˵Ĵ��ص㣬���ǰ�װ���ȸߡ�����Դ����ó̶ȸߡ���Ϊװ�乤�����Ӿ�ϸ����������ѡ��װ������������е��������������ϸ�����İ�װ��
������ACOPOS P3
������SafeMOTION 3��ģ��
8EI2X2HWTS0.XXXX-1
8EI2X2MWTS0.XXXX-1
8EI4X5HWTS0.XXXX-1
8EI4X5MWTS0.XXXX-1
8EI8X8HWTS0.XXXX-1
8EI8X8MWTS0.XXXX-1
������SafeMOTION 2��ģ��
8EI2X2HWDS0.XXXX-1
8EI2X2MWDS0.XXXX-1
8EI4X5HWDS0.XXXX-1
8EI4X5MWDS0.XXXX-1
8EI8X8HWDS0.XXXX-1
8EI8X8MWDS0.XXXX-1
������SafeMOTION 1��ģ��
8EI1X6HWSS0.XXXX-1
8EI1X6MWSS0.XXXX-1
8EI2X2HWSS0.XXXX-1
8EI2X2MWSS0.XXXX-1
8EI4X5HWSS0.XXXX-1
8EI4X5MWSS0.XXXX-1
8EI8X8HWSS0.XXXX-1
8EI8X8MWSS0.XXXX-1
������3��ģ��
8EI2X2HWT10.XXXX-1
8EI2X2MWT10.XXXX-1
8EI4X5HWT10.XXXX-1
8EI4X5MWT10.XXXX-1
8EI8X8HWT10.XXXX-1
8EI8X8MWT10.XXXX-1
������2��ģ��
8EI2X2HWD10.XXXX-1
8EI2X2MWD10.XXXX-1
8EI4X5HWD10.XXXX-1
8EI4X5MWD10.XXXX-1
8EI8X8HWD10.XXXX-1
8EI8X8MWD10.XXXX-1
������1��ģ��
8EI013HWS10.XXXX-1
8EI017HWS10.XXXX-1
8EI1X6HWS10.XXXX-1
8EI1X6MWS10.XXXX-1
8EI2X2HWS10.XXXX-1
8EI2X2MWS10.XXXX-1
8EI4X5HWS10.XXXX-1
8EI4X5MWS10.XXXX-1
8EI8X8HWS10.XXXX-1
8EI8X8MWS10.XXXX-1
������ACOPOS multi
���������ģ�飨����ģ�飩
���������ڰ�װ
8BVI0014HWS0.000-1
8BVI0028HWS0.000-1
8BVI0055HWS0.000-1
8BVI0110HWS0.000-1
8BVI0220HWS0.000-1
8BVI0330HWS0.000-1
8BVI0440HWS0.000-1
8BVI0660HWS0.000-1
8BVI0880HWS0.004-1
8BVI1650HWS0.000-1
��������ȴ���ǽʽ��װ
8BVI0014HCS0.000-1
8BVI0028HCS0.000-1
8BVI0055HCS0.000-1
8BVI0110HCS0.000-1
8BVI0220HCS0.000-1
8BVI0330HCS0.000-1
8BVI0440HCS0.000-1
8BVI0660HCS0.000-1
8BVI0880HCS0.004-1
8BVI1650HCS0.000-1
���������ģ�飬SafeMOTION������ģ�飩
���������ڰ�װ
8BVI0014HWSA.000-1
8BVI0014HWSS.000-1
�ŷ�ϵͳ�Ǿ��з����ıջ��Զ�����ϵͳ�������ɿ���������������װ�á�����װ�ú͵綯����ɵġ������ŷ��������Խ���λ�á��ٶȡ�ת�صĵ�����Ƽ���Ͽ���
ת�ؿ��ƣ� ͨ���ⲿģ�����������ֱ�ӵĵ�ַ�ĸ�ֵ���趨��� ���������ת�صĴ�С����ҪӦ������Ҫ�ϸ����ת�صij��ϡ�——����������
�ٶȿ��ƣ�ͨ��ģ����������������Ƶ�ʶ�ת���ٶȵĿ��ơ� ——�ٶȻ���
λ�ÿ��ƣ� �ŷ���*���õĿ��ƣ�λ�ÿ���ģʽһ����ͨ���ⲿ����������Ƶ����ȷ��ת���ٶȵĴ�С��ͨ������ĸ�����ȷ��ת���ĽǶ�,����һ��Ӧ���ڶ�λװ�� �� ——��������
�����ŷ�����ϵͳ���ܵ���Ҫָ����Ƶ�����Ⱥ;��ȡ�Ƶ�����ȼ�ƴ�������ϵͳƵ����Ӧ�������涨����ӳ�ŷ�ϵͳ�ĸ��ٵĿ����ԡ�����Խ������Խ�á��ŷ�ϵͳ�Ĵ�����Ҫ�ܿ��ƶ����ִ�л����Ĺ��Ե����ơ�����Խ����Խխ���ŷ�ϵͳ����ָ������������������ź�Ҫ��ľ�ȷ�̶�,��������ʽ����,�ɸ���Ϊ��̬���,��̬���;�̬�������������ɡ�
�ŷ����������Ƶ���IJ���
��Ƶ�����ŷ��Ŵ���������·����ƻ�·�ϵ��������£�
����·����Ƶ�����ŷ��Ĺ��ɻ�����ͬ�����ߵ����������ŷ��������˳�Ϊ��̬�ƶ����IJ�����ֹͣʱ�ò����������ŷ�������۵Ĺ������������ŷ���������ƶ���
���ƻ�·�����Ƶ����ȣ��ŷ��Ĺ����൱���ӡ�Ϊ��ʵ���ŷ���������Ҫ���ӵķ���������ģʽ�л������ƣ�����/�ٶ�/ת�أ��ȹ��ܡ�
�ŷ����������Ƶ�������ܼ�Ӧ�÷�����Ҫ�������£�
���ƾ��Ȳ�ͬ
�����ŷ�����Ŀ��ƾ����ɵ�����˵���ת��������֤��
��Ƶ���Բ�ͬ
�����ŷ������ת�dz�ƽ�ȣ���ʹ�ڵ���ʱҲ�������������.��0.2r/MINת�����Կ��϶������ƽ����ת�����ٱȿɴﵽ1:10000�����DZ�Ƶ��ԶԶ�ﲻ���ġ�
���й���������ͬ
�ŷ�������һ����ж�ʱ3�����������������ڿ˷����Ը���������˲��Ĺ������ء���Ƶ��һ������1.5�����ء�
�Ӽ������ܲ�ͬ
�ڿ���������ŷ�����Ӿ�ֹ״̬���ٵ�2000r/min����ʱ���ᳬ20mS������ļ���ʱ��������Ĺ����Լ������й�ϵ��ͨ����������Խ�����ʱ��Խ����
��̬��ӦƷ������
�ŷ������λ�ÿ���ģʽ�£�ͻ�Ӹ��ػ��أ�����û�г��������ת�ٲ��������������֤�˻����ӹ��ľ��ȡ�
��������ͬ
��Ƶ�����������ƽ����첽������ŷ��������������ƽ�������ͬ��������ŷ�ϵͳ�����ܲ���ȡ���������������ܣ����Ҹ��ŷ������������ֱ�ӵĹ�ϵ���ŷ�����IJ��ϡ��ṹ�ͼӹ�����ҪԶԶ���ڱ�Ƶ�������Ľ�������������������ز���Ҳ���������ܲ�ͬ�ĸ�����
Ӧ�ó��ϲ�ͬ
��Ƶ�������ŷ���������������Ŀ��ơ�ǰ�����ڴ�����������,���������˶���������һ��������һ�㹤ҵӦ��Ҫ������ָ��Ҫ�ߵ�Ӧ�ó��ϣ���ͳɱ�����ά����ʹ�ü��ص��������Ʒ����һ�����Ǵ����Ź�ҵ�Զ�����չˮƽ�IJ�Ʒ��������ܡ�����Ӧ���߾��� ��
�ŷ��ͱ�Ƶ����ʹ��Ŀ�ġ����ܷ�����ڱ��ʵIJ��졣ѡ����һ��ȡ��������ģʽ�������������۸�����ء�
 ɨһɨ���ֻ����
ɨһɨ���ֻ����