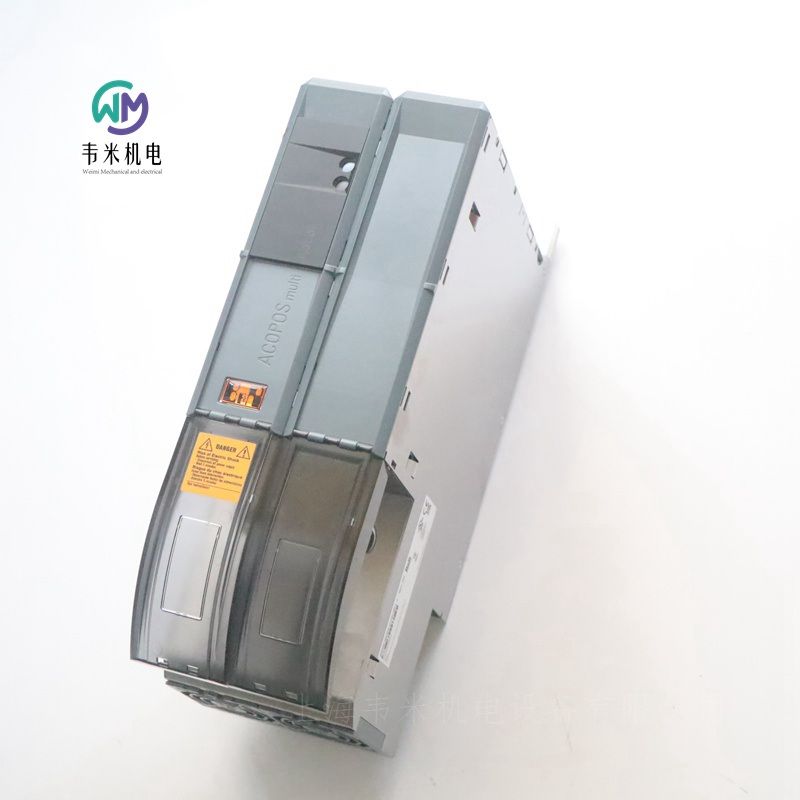
������ģ�������ģ��X20AO2632���Ϻ�Τ�����豸����˾��Ӫ���۲�Ʒ��ԭ��ԭװ���������ϣ��������ߣ� �����棺 ����ϵ�ˣ����ࡣ�ȳϻ�ӭ���Ͽͻ���ѯ����
X20AO2632 X20ģ�������ģ��,2·�����,±10 V / 0 to 20 mA,16-bit�ֱ���
I/Oϵͳ
������I/Oϵͳ�Ƕ��������ʹ�õġ���IP20��IP67�����ȼ�����ʵ�ֿ��ƹ������������ϡ����ǻ�֧�����б����ֳ�����ϵͳ��I/Oϵͳ����ͨ����ȫ�������˽ṹ���ʺϻ���Ӧ�á���I/O�����밲ȫI/O���ʹ�ã����ҷֲ�ʽ���ܿ���Ƕ��I/Oϵͳ����˿������ɵ�ʵ�����绷�������Щ���ܡ�
���ƹ��ڲ�
�dz����յ�X20ϵͳ�����ṩ���ֲ�ͬ��ģ�飬����ʽ��Ʊ��ڵĽ��ߺ�ά����
���ƹ��ⲿ
X67ϵͳ��X20ϵͳ���ݣ����ҿ��Ը�����Ҫ������ϡ����⣬IP67�����ȼ�ʹ�����ر������ڶ��ӹ�����
ֱ�Ӽ��ɷ���
XVϵͳ��������ֱ�Ӽ�����I/O�����С��Ӷ�������I/Oģ��ͽ��������������˻�е����ɱ���
ACOPOS
�����ŷ�������
����ACOPOSϵ���ŷ��������Խϸߵľ������Ӳ������ӿ��������ڲ����������Ϊ��ʵ��
�������ŷ��������
ACOPOS�ŷ�����ϵ���DZ������Զ�����������е�һ����Ҫ��ɲ��֡������ҵ��ר�ù����Լ�ֱ�۵Ĺ��������̿���ʱ���ǰ�ᡣ
�����Զ������������һ����Ҫ����������Ӧ�ó�������������̷���˲��ʱ�ȿ����ֵز����¼���Ӧ��ACOPOS�ŷ������߱���һ���ԣ���������ʱɨ��ʱ��dz�����ͨ��ѭ�����ڽ�400μs������ѭ����50μs��
��Ʒ�ʣ�����ǿ���Ҳ�����ȫ
�ڹ�ҵ������Ҫ��֤��ȷ�����ͱ��������ӵ�ż���EMC�����˱��й涨�IJ������⣬�������ڶ��ӵĻ����н����ֳ����ԡ����Խ�����֤������ʵ���Һ�ʵ�ʲ���������IJ���ָ�ꡣ�豸�л�������CEָ�Ϲ涨���˲�����
���������ģ�������Ѳ����ĵ������¶�Ԥ�������ϵͳ�����ܡ��Ӷ�ʵ����ϵͳ���ܡ�
ACOPOS�ŷ��������õ����Ƕ��ʽ����оƬ�ϵ���Ϣ����Щ��Ϣ������صĻ���һ�廯���ݡ���˲�����Ҫ���������׳������˹����ò���������ʱ��Ҳ�����١���ά���ڼ䣬�ṩ��صı�Ҫ���ݲ����ٶ�λ�¹�ԭ��
ACOPOS�ŷ�ϵ��Ҳ�ṩ������Ϳ��ĵ�·�塣��Щ��Ʒ������ͬ�Ĺ���ڷ����������Ȼ���Ӱ���¸���ǿ��
ģ�黯���Ժͳ�ǿ��ͨ������
��Ҫ��I/O������ACOPOS�ŷ��������豸�е�һ���֣����ڲ���һ���ŷ��ᡣ�û���ִ�и߾��Ȳ�������ӡ����Ƶ�����ʱ���ṩ2������ʽ���롣
��һ������ACOPOS�ŷ�����ʱ��ʹ�ò���ģ�������ض���Ӧ��������ʽģ����������������������������������������ʾ�豸��Ҳ�������ӱ���������������ִ�л��������⣬���������������ɵ�CPUģ��Ҳ�����ڻ����������Զ�����
����Ĵ��¿ռ�
ACOPOS�ŷ���������������ҵ�õ��˳ɹ���Ӧ�ã�չʾ���䴴�µ���ƺ�����ӡ����̵Ĵ��������û��Ѻõ����ܺ��ܡ�
��װ��ҵ
��е�ּ���
������ҵ
��ֽӡˢ��ҵ
��֯��ҵ
ľ�ļӹ���ҵ
�����ӹ���ҵ
���Ӱ뵼����ҵ
������ģ�������ģ��X20AO2632
X20AO2632 X20ģ�������ģ��,2·�����,±10 V / 0 to 20 mA,16-bit�ֱ���
X20AO4622 X20ģ�������ģ��,4·�����,±10 V / 0 to 20 mA,12-bit�ֱ���
X20AO4632 X20ģ�������ģ��,4·�����,±10 V / 0 to 20 mA,16-bit�ֱ���
X20AT2222 X20�¶�����ģ��,2������PT100,PT1000���迹��������,�ֱ���0.1K,3�����Ӽ���
X20AT2402 X20�¶�����ģ��,2·�ȵ�ż����,����J,K,N,S,�ֱ���0.1K
X20AT4222 X20�¶�����ģ��,4������PT100,PT1000���迹��������,�ֱ���0.1K,3�����Ӽ���
X20AT6402 X20�¶�����ģ��,6·�ȵ�ż����,����J,K,N,S,�ֱ���0.1K
X20CM8281 X20ͨ�û��ģ��,4�������,24VDC,©ʽ,1�����Ӽ���,2·���������,0.5 A,Դʽ,1�����Ӽ���, 1��ģ��������,±10 V��0-20 mA/4-20 mA,12-bit�ֱ���,1��ģ�������, ±10 V/0-20 mA,12-bit�ֱ���, 2������������Ϊ�¼��������Ų���
X20CM8323 X20 PWMģ��,8�����縺�������������,��������0.6A,������ֵ2A,��ѹ���,ʱ����ת��,״ָ̬ʾLEDs
X20PS4951 X20��λ�ƹ���ģ��,��λ�Ƶ�ѹ4x±10V
X20CM8281 X20ͨ�û��ģ��,4�������,24VDC,©ʽ,1�����Ӽ���,2·���������,0.5 A,Դʽ,1�����Ӽ���, 1��ģ��������,±10 V��0-20 mA/4-20 mA,12-bit�ֱ���,1��ģ�������, ±10 V/0-20 mA,12-bit�ֱ���, 2������������Ϊ�¼��������Ų���
X20CM8323 X20 PWMģ��,8�����縺�������������,��������0.6A,������ֵ2A,��ѹ���,ʱ����ת��,״ָ̬ʾLEDs
X20PS4951 X20��λ�ƹ���ģ��,��λ�Ƶ�ѹ4x±10V
X20CM1941 X20����ģ��,14-bit����ģ������,ABR����ɴ�10-bit
X20DC1196 X20������������ģ��,1��ͨ��ABR,5 V,250 kHz����Ƶ��,4x��
X20DC1198 X20������������ģ��,1��ͨ��SSI,5 V,1MBit/s,32-bit
X20DC1396 X20������������ģ��,1��ͨ��ABR,24V,100kHz����Ƶ��,4x��
X20DC1398 X20������������ģ��,1��ͨ��SSI,24V,125MBit/s,32-bit
X20DC2190 X20����������ģ��,������������,�ӿ�: EP����/ֹͣ,DPI/IP,2�����а�,4��·����ֵ
X20DC2396 X20������������ģ��,2��ͨ��ABR,24V,100kHz����Ƶ��,4x��
X20DC2398 X20������������ģ��,2��ͨ��SSI,24V,125MBit/s,32-bit
X20DC2395 X20������������ģ��,1 x SSI����ʽ������,24 V,1 x ABR����ʽ������,24 V, 2 x AB����ʽ������,24 V, 4 x �¼���������2 x PWM
X20DC4395 X20������������ģ��,2 x SSI����ʽ������,24 V,2 x ABR����ʽ������,24 V, 4 x AB����ʽ������,24 V,8 x �¼���������4 x PWM
X20IF1020 X20�ӿ�ģ��,1��RS232,max. 115.2 kBit/s,��������
X20IF1030 X20�ӿ�ģ��,1��RS485/RS422,max. 115.2 kBit/s,��������
X20IF1061 X20�ӿ�ģ��,1��Profibus DP��վ,max.12 MBit/s, ��������max.3.5 KB��SFlb�������max. 3.5 KB�������
X20IF1063 X20�ӿ�ģ��,1��Profibus DP��վ�ӿ�,max.12 MBit/s,��������
X20IF1072 X20�ӿ�ģ��,1��CAN�ӿ�,max.1 MBit/s,��������,����1 x TB2105������
X20IF1082 X20�ӿ�ģ��,1��ETHERNET Powerlink�ӿ�(EPL���,Э��֧��),�����������������,����2x hub
X20IF1091 X20�ӿ�ģ��,1��X2X Link��վ�ӿ�,��������,����1 x TB704������
X20IF2772 X20�ӿ�ģ��,2��CAN�ӿ�,max.1 MBit/s,��������,����2 x TB2105������
X20IF2792 X20�ӿ�ģ��,1��CAN�ӿ�, max.1 MBit/s,��������,1��X2X Link��վ�ӿ�,SFlb�����,����1 x TB2105��1 x TB704������
X20CS1020 X20�ӿ�ģ��,1��RS232,max. 115.2 kBit/s
X20CS1030 X20�ӿ�ģ��,1 x RS485/RS422,max. 115.2 kBit/s
X20CS1070 X20�ӿ�ģ��,1 x CAN, max. 1 MBit/s, �շ�˫�����߱����幦��
X20ZF0000 X20��ģ��(û�й���)
��������һ��ɷ�Ϊֱ���������Ʒ��ͼ���������Ʒ������֡�
��1�� ֱ���������ƣ��ֳƷ����أ��ֿ��Է����֣�
�����������ǵȴ��������ʵ��������������ֵ��Ϊ�����źţ����������ջ�ϵͳ������������ʵ��ֵ�����������Ƚϣ���ƫ������������ã�ʹʵ�����������������ȡ��Ӵ������ṹ��ͬ�����ɷ�Ϊλ��ʽ�ͷ���ʽ���� ��
���û��������������������������ɻ���������ϵͳ�����ƻ������㶨ʹ��Ʒ�����㶨�������������Ʒ������ڸ߾��ȡ����ٶȵ��������Ƴ��ϣ����п��ƾ��ȸߡ�ʵʱ���ܺõ��ŵ㡣
��2������������ƣ��ֳƲ������ƣ���ͨ����Ӱ�������ȶ��IJ����ĵ��ڲ������ܳ��ֵ������仯����ӵر��������ȶ�����ֻ���������趨ֵ�����ü�����ɼ�������ʵ��ֵ�����������γɱջ����ƣ�����ͨ���Ա��ػ�����������ĵ��������ŵ����Ŀ�������Ӷ��������к㶨���ƣ��Ӷ�ʹ�綯�����ر��ֲ��䣬��֤����ȡ��Ʒ�������㶨
��������ϵͳ��ָ�ܹ��־õؿ���ԭ�����豸������ʱ�����������������������ļ��١����ٺ����١���ʹ�ڽ���ͣ������£�ҲӦ��������֤�������ﲻ�����������Ƶ��ȶ����ֱ�ӹ�ϵ�����в�Ʒ������������������,ԭ���������в���Ư��,����ַ��и������Ʒֽ��������;����������,ԭ�����ױ�����,ʹ���и������Ʒֽ��ͷ���ࡣ
���ϻ����ǽ���������������ϵIJ�����ճ�ϼ�ճ�ϳ�Ϊһ�塣ʹԭ�в��ϵõ��µĹ��ܡ��籡Ĥ����������Ĥ��ֽ�ţ��IJ��Ⱦ;������õ�����ɺͽ�Ƭ�����ࡢ���ϵȸ��ϡ�����������װ���ϻ����϶��Ǹ��ϳ�Ʒ��
���������������ϻ�е������֮һ�����������ݻ�ͷ���������Լ��ݸ������ߵļнǣ����Խ���ͷ�ֳ�ֱ�ǻ�ͷ��б�ǻ�ͷ�ȡ�
�ݸ˼������������ݸ���ת������ѹ��������������ʹ�����Ͽ��Գ�ֽ����ܻ��Լ����Ȼ�ϣ�ͨ����ģ���͡����ϼ��������Ի�������Ϊ˫�ݸ˼����������ݸ˼������Լ�������Ķ��ݸ˼������Լ����ݸ˼�������
�㺸��ϵ����˫��˫��������ӵ�ԭ��������ʱ�����缫��ѹ����ʹ������������缫��ѹ�����γ�һ���ĽӴ����裬�����ӵ�����һ�缫������һ�缫ʱ�����Ӵ�������γ�˲������۽ӣ��Һ��ӵ���˲�����һ�缫�������������˵缫�γɻ�·�����Ҳ����˼������������ڲ��ṹ��
�Զ��������а��Զ���ȫ�Զ������Զ���������һ���ִ���ҵ��ũҵ������ҵ�����������л�е����һ���Զ������ɿ��Ƽ���������
�Զ��������а��Զ���ȫ�Զ��������磺�������豸������������Ҫ���Ŀ�ģ������Զ���������ȫ�Զ���ֻ��Ҫ��Ϊ����Ա��ȷ�����Ƶ�Ҫ��ͳ�����ֱ�Ӳ����������̵Ŀ��Ƽ��������Զ�������Ҫ��ͨ����ʩ���豸����е���������ֹ����Ͷ����IJ��롣
�����Զ���
ʯ�����ƺͻ����ȹ�ҵ����������Ļ�ѧ�������Զ������ơ�һ������ɼ���DZ����������ͼ��������ɵĹ��̿���ϵͳ���Լ���¯�����������豸���������������ſ��ơ����õ���Ҫ���Ʒ�ʽ�з������ơ�ǰ�����ƺ��ſ��Ƶȡ�
��е�����Զ���
���ǻ�е�������������Զ��������ϵĽ���������Ķ�������ɢ���������ڵĻ�е�����Զ����Dz��û�е����������ĵ����Զ������Ǽ��Զ������ߡ����ڵ��Ӽ������Ӧ�ã����������ػ������ӹ����ġ������ˡ������������ơ�������������졢�Զ����ֿ�ȡ����Ƴ���Ӧ��Ʒ�֡�С����������ʽ����������ϵͳ��FMS��������������ϵͳΪ�������Զ������䣬������Ϣ���������������Զ����������˲��ü������������ϵͳ��CIMS���Ĺ����Զ�������ϵͳ��
�Զ��������Զ����ڡ���⡢�ӹ��Ļ����豸���DZ������涨�ij����ָ���Զ�������ҵ�ļ�����ʩ����Ŀ���������Ӳ�����������������ͳɱ����Ͷ�ǿ�ȡ�����������ȫ�ȡ�
������ģ�������
X20AO2437
X20AO2438
X20AO2622
X20AO2632
X20AO2632-1
X20AO4622
X20AO4632
X20AO4632-1
X20AO4635
X20CM8281
X20RT8202
X20RT8401
�������¶Ȳ���
X20AT2222
X20AT2311
X20AT2402
X20AT4222
X20AT4232
X20AT6402
X20ATA312
X20ATA492
X20ATB312
X20ATC402
���������������
X20MM2436
X20MM3332
X20MM4331
X20MM4455
X20MM4456
X20SM1426
X20SM1436
��������������ģ��
X20CM0985
X20CM0985-1
X20CM4323
X20CM4810
X20CM6209
X20CM8281
X20CM8323
X20CMR010
X20DS4387
X20DS438A
X20PD0011
X20PD0012
X20PD0016
X20PD2113
X20PS4951
��������������
X20CM1201
X20CM1941
X20CM8281
X20DC1073
X20DC1176
X20DC1178
X20DC1196
X20DC1198
X20DC11A6
X20DC1376
X20DC137A
X20DC1396
X20DC1398
X20DC1976
X20DC2190
X20DC2395
X20DC2396
X20DC2398
X20DC4395
X20DS1119
��ҵ�������ǹ㷺���ڹ�ҵ����Ķ�ؽڻ�е�ֻ�����ɶȵĻ���װ�ã�����һ�����Զ��ԣ������������Ķ�����Դ�Ϳ�������ʵ�ָ��ֹ�ҵ�ӹ����칦�ܡ���ҵ�����˱��㷺Ӧ���ڵ��ӡ������������ȸ�����ҵ����֮�С�
һ����˵����ҵ������������������ϵͳ��ɡ�
�����ǻ�е���֡����в��ֺͿ��Ʋ��֡�
������ϵͳ�ɷ�Ϊ��е�ṹϵͳ������ϵͳ����֪ϵͳ��������-��������ϵͳ���˻�����ϵͳ�Ϳ���ϵͳ��
1.��е�ṹϵͳ
�ӻ�е�ṹ��������ҵ�����������Ϸ�Ϊ���������˺Ͳ��������ˡ����������˵��ص���һ������˶���ı���һ���������ԭ�㣬������������һ�����˶���ı���һ���������ԭ�㡣���ڵĹ�ҵ�����˶��Dz��ô���������������������Ϊ��ƽ̨�Ͷ�ƽ̨ͨ�����������������˶��������ӣ��������������������������ɶȣ����Բ�����ʽ������һ�ֱջ������������������������ɲ��֣��ֱ���������ֱۡ��ֱۻ����Ի�ռ��кܴ��Ӱ�죬�������ǹ��ߺ���������Ӳ��֡��봮����������Ƚϣ����������˾��иնȴṹ�ȶ������������������ȸߡ��˶�����С���ŵ㡣��λ������ϣ����������˵��������ף�������ʮ�����ѣ����������������෴�����������ѣ�����ȴ�dz����ס�
2.����ϵͳ
����ϵͳ�����е�ṹϵͳ�ṩ������װ�á����ݶ���Դ��ͬ������ϵͳ�Ĵ�����ʽ��ΪҺѹʽ����ѹʽ������ʽ�ͻ�еʽ4�֡����ڵĹ�ҵ�����˲���Һѹ����������Һѹϵͳ����й¶�������͵��ٲ��ȶ������⣬���ҹ��ʵ�Ԫ���غͰ���Ŀǰֻ�д������ػ����ˡ������ӹ������˺�һЩ����Ӧ�ó���ʹ��Һѹ�����Ĺ�ҵ�����ˡ���ѹ���������ٶȿ졢ϵͳ�ṹ��ά���㡢�۸�͵��ŵ㡣������ѹװ�õĹ���ѹǿ�ͣ�����λ��һ������ڹ�ҵ������ĩ��ִ������������������ץ����ת��������������Ϊĩ��ִ�����������С�С���ɵĹ���ץȡ��װ�䡣����������Ŀǰʹ�ö��һ��������ʽ�����ص��ǵ�Դȡ�÷��㣬��Ӧ�죬���������źż�⡢���ݡ��������㣬�����Բ��ö������Ŀ��Ʒ�ʽ���������һ����ò���������ŷ������ĿǰҲ�в���ֱ�����������������۽ϸߣ�����Ҳ��Ϊ���ӣ��͵������ļ�����һ�����г�����������������ּ������������dz��ּ����������ڲ������������д�����ֱ����������ֱ�ߵ���ڲ��������������Ѿ��õ��˹㷺Ӧ�á�
3.��֪ϵͳ
�����˸�֪ϵͳ�ѻ����˸����ڲ�״̬��Ϣ�ͻ�����Ϣ���ź�ת��Ϊ������������������֮���ܹ������Ӧ�õ����ݺ���Ϣ��������Ҫ��֪����������״̬��صĻ�е������λ�ơ��ٶȺ����ȣ��Ӿ���֪�����ǹ�ҵ�����˸�֪��һ����Ҫ���档�Ӿ��ŷ�ϵͳ���Ӿ���Ϣ��Ϊ�����źţ����ڿ��Ƶ��������˵�λ�ú���̬�������Ӿ�ϵͳ����������⡢ʶ����ʳƷ�ּ𡢰�װ�ĸ�������õ��˹㷺Ӧ�á���֪ϵͳ���ڲ�������ģ����ⲿ������ģ����ɣ����ܴ�������ʹ������˻����˵Ļ����ԡ���Ӧ�Ժ����ܻ�ˮƽ��
4. ������-��������ϵͳ
������-��������ϵͳ��ʵ�ֻ��������ⲿ�����е��豸���ϵ��Э����ϵͳ�����������ⲿ�豸����Ϊһ�����ܵ�Ԫ����ӹ����쵥Ԫ�����ӵ�Ԫ��װ�䵥Ԫ�ȡ���ȻҲ�����Ƕ�̨�����˼���Ϊһ��ȥִ�и�������Ĺ��ܵ�Ԫ��
5.�˻�����ϵͳ
�˻�����ϵͳ����������˽�����ϵ�Ͳ�������˿��Ƶ�װ�á����磺������ı��նˡ�ָ�����̨����Ϣ��ʾ�塢Σ���źű������ȡ� [3]
6.����ϵͳ
����ϵͳ�������Ǹ��ݻ����˵���ҵָ���Լ��Ӵ����������������źţ�֧������˵�ִ�л���ȥ��ɹ涨���˶����ܡ���������˲��߱���Ϣ������������Ϊ��������ϵͳ���߱���Ϣ������������Ϊ�ջ�����ϵͳ�����ݿ���ԭ���ɷ�Ϊ�������ϵͳ����Ӧ�Կ���ϵͳ���˹����ܿ���ϵͳ�����ݿ����˶�����ʽ�ɷ�Ϊ��λ���ƺ������켣���ơ�
 ɨһɨ���ֻ����
ɨһɨ���ֻ����









 �Զ��������а��Զ���ȫ�Զ������Զ���������һ���ִ���ҵ��ũҵ������ҵ�����������л�е����һ���Զ������ɿ��Ƽ���������
�Զ��������а��Զ���ȫ�Զ������Զ���������һ���ִ���ҵ��ũҵ������ҵ�����������л�е����һ���Զ������ɿ��Ƽ���������